Nutzung des Labors für Forschungs- und Entwicklungsprojekte
In der Forschung- und Entwicklung widmet sich das Labor für GNSS- und Navigation in einem ersten Schwerpunkt und Projektbereich http://www.navka.de
- Konzeption sowie mathematischen Modellbildung, algorithmischen und technologischen Realisierung von Verfahren und Algorithmen zum Einsatz von GNSS in den Bereichen statischer und mobiler Echtzeitanwendungen sowie der Forschung und Entwicklung (FuE) von
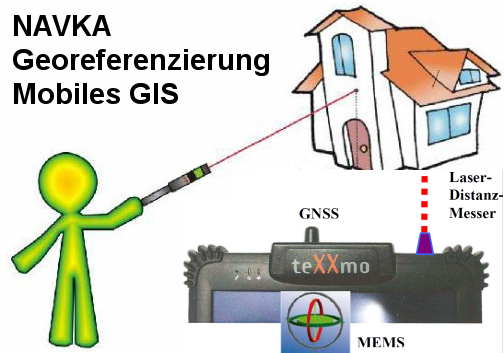
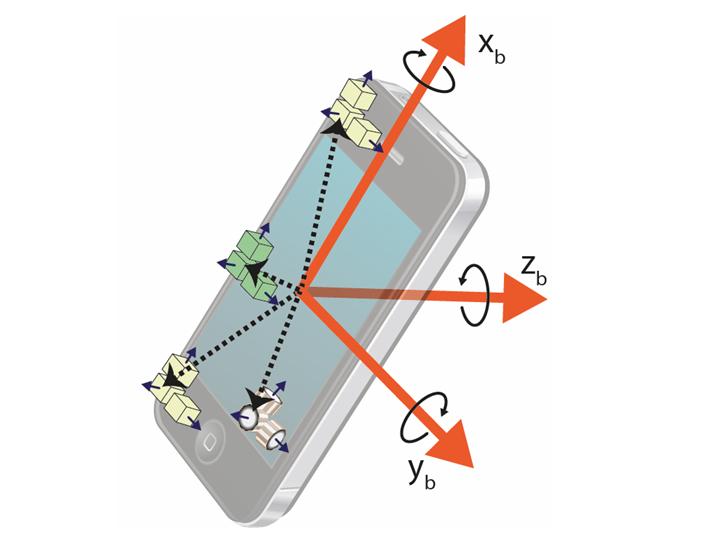
- GNSS/MEMS/Optik-basierten Multisensorsystemen für Anwendungen in der nahtlosen Out- und Indoor Navigation (Position & Orientierung) von Boden-/Wasser /Luftfahrzeugen (UAS, bemannter Flug) und Personen sowie der Objektgeoreferenzierung im Smartphone-basierten Mobilen GIS befasst (http://www.navka.de)
- Geomonitoring von Gebäuden, Baustellen, technischen Anlagen, Naturgefahren und geodynamischen Vorgängen sowie dem Structural Health Monitoring (SHM).
Ein dritter Schwerpunkt ist mit dem Thema
-
Integrierte Geodäsie, Schwerefeld- und Geoid-Bestimmung sowie der Transformation zwischen klassischen Landessystem und dem ITRF-Bezug vor dem Hintergrund der Bereitstellung Geodätischer Infrastrukturen für GNSS-Dienste, für DGNSS/PPP-Positionierung und für die GNSS-basierte und multisensorische Navigation befasst.
(www.moldpos.eu, http://goca.info).
|
GOCA – GNSS/LPS-basiertes Online Control and Alarm System.
FuE zur Echtzeitüberwachung von Bauwerken, geotechnischen Anlagen und Frühwarnung zum Katastrophenschutz.
www.goca.info |
|
|
DFHBF - Digitale Finite Elemente Höhenbezugsfläche – Mathematische Modelle zur
Repräsentation und Berechnung von Höhenbezugsflächen zur Höhenpositionierung in GNSS-Diensten (DFHBF).
www.dfhbf.de |

|
|
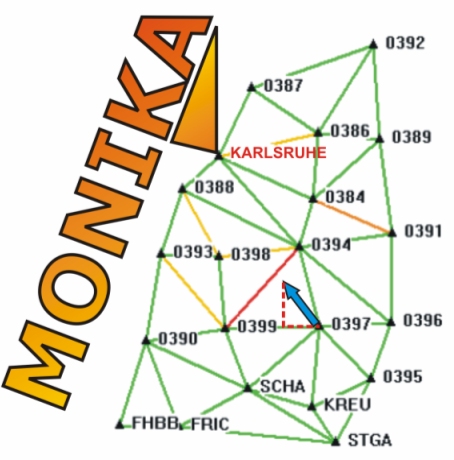
MONIKA - Deformationsintegritäts-Monitoring und Katastro phenschutz für und
mittels GNSS-Positionierungsdiensten nach dem Karlsruher Modellansatz.
www.monika.ag |
|
|
MOLDPOS - Development of a High Capacity Real-Time GNSS Positioning Service for Moldova.
www.moldpos.eu |
|
|
NAVKA - GNSS/MEMS/MOEMS Multisensornavigation und Objekt-Georeferenzierung
- Mathematische Modelle, Algorithmen und Software.
www.navka.de |

|
|
E-VOLOCOPTER - Navigation und Steuerung E-Volocopter (Mathematische Modelle Algorithmen und Software)
ZIM Verbundforschungsprojekt e-Volokopter Abgeschlossen: August 2015 |

|

FuE-Teilbereich Navigation und Steuerung des E-Volocopters (Bild)
(www.navka.de/index.php/de/ueberblick-evolo) im Projekt www.navka.de

FuE-Teilbereich Indoornavigation für S.A.R im Projekt www.navka.de in Kooperation
mit dem B.W. Verbundforschungsprojektpartner IN GmbH)
LowCost GNSS/MEMS/MOEMS Navigations-Hardware und SW-Development-Kits
| Crista Sensor IMU Firma Cloud Cap Technology |
|
|
| MTi-G Firma Xsens |
|

|
| Antaris 4 bzw. LEA-4R GPS Receiver von ublox |
|

|
| LEA-6T Modul Firma ublox |
|
|
| AsterRx1 von Septentrio |
|
|
| 2-Frequenzboard OEMV-1DF-RT2 von Novatel |
|

|
|
VOLKSBOT
Fraunhofer Institut Intelligente Analyse- und Informationssysteme www.volksbot.de |
Ansteuerbarer Fahrroboter für Navigationsentwicklungen für Fahrzeuge im Outdoorbereich und für Indoorfahrzeuge (Roboter, Hallenbetriebsfahrzeuge) sowie für Sonderfahrzeuge zur Individualmobilität (z.B. Rollatoren, Rollstühle) |

|
|
NAVKA UAV
Flightcontrol- und skalierbare UAV-Entwicklungen Flightcontrol- und skalierbare UAV-Entwicklungen |
NAVKA UAV Testdrohne mit NAVKARine FC4 Flightcontrol.
Eigenentwicklung NAVKA-Projekt. Sensoren
|

|
|
NAVKARine FC4
GNSS/MEMS Flugnavigations- und Steuerungsbox Flyer NAVKARINE FC4 |
Allgemeine Flugnavigations- und Steuerungsbox für Multikopter.
Eigenentwicklung NAVKA-Projekt. Sensoren
|

|
|
NAVKARine G1MC
GNSS/MEMS/MOEMS Navigationsbox Flyer NAVKARINE G1MC |
Allgemeine GNSS/MEMS/MOEMS-Navigationsbox
Eigenentwicklung NAVKA-Projekt. Sensoren
|

|
|
KALEO-Georeferencer
www.navka.de/images/files/texxmo_kaleo.pdf |
3D-Georeferenzierungs Tablet
Gemeinsame B.W. Verbundforschungsentwicklung der Fa. teXXmo, Böblingen mit dem NAVKA FuE-Team GNSS-Sensoren
|
|
|
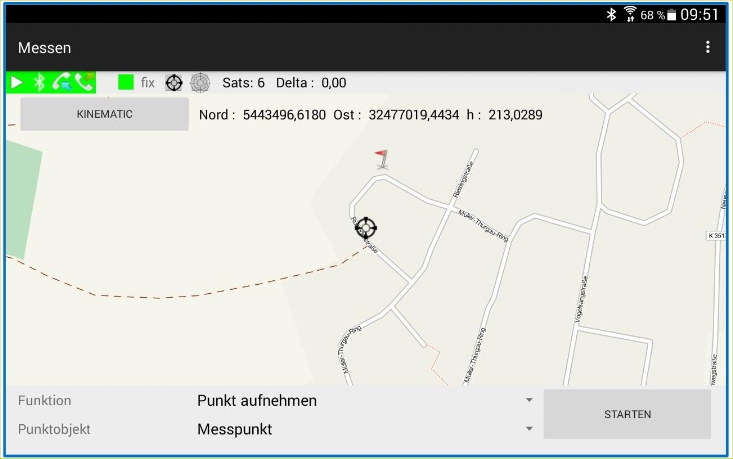
Samsung-Galaxy Smartphone
Andriod Tablet |
Entwicklungen von Out- und Indoornavigations-Technologien für Personen, Fahrzeuge und Güter sowie Mobile Georeferenzierungs- und GIS-Technologien. Entwicklungen meist auf Android-Basis unter Android Developer Tools (ADT). Integration von Open-Source GNSS-Software sowie NAVKA-Lib (C-Algorithmen) mit NDK. |
|
| NAVKA Smartphone RTK |
GNSS Lowcost System zur mobilen Geodatenerfassung
Komponenten
|

|

Links: Praktikum Geodatenerfassung 2 (GIM). Thema: Bestandsdokumentation mit georeferenzierten Bildern über Quadropterdrohne (UAV), Bild oben |

|

GNSS-Testmessungen auf einem sieben Pfeiler des Observatoriums des Labors für GNSS und Navigation.
Inhalt
Stand: 13.05.2026
Prof. Dr.-Ing. Reiner Jaeger
- Leitung Labor fuer GNSS & Navigation -